wie gerade hier angedeutet, habe ich hier offensichtlich noch Aufschlauungsbedarf...
Ich war bisher davon ausgegangen, dass über die Applikation des Herstellers in der ETS auch durchgehend zwangsweise vorgegeben wird, welche Flags an den entsprechenden KOs überhaupt gesetzt werden können. Das scheint in der Tat nicht wirklich so zu sein. Es gilt offensichtlich ein klares sowohl als auch. Das Häkchen "Lesen bei Init" ist bei diversen Devices ja ausgegraut. Daher scheint es da also doch grundsätzlich eine Einflussmöglichkeit zu geben.
Mir ist nun aber damit noch nicht ganz klar, ob ein KNX-Device zwingend auf in der ETS gesetzt Flags reagieren muss.
Hier irritiert mich der Konjunktiv.
Wenn ich in unterschiedliche Dokus zu Geräten schaue, die bei mir im Einsatz sind, dann stelle ich wieder fest, dass es da ein total unterschiedliches Bild gibt. In einem Handbuch von MDT finde ich z.B. folgende Passage:
Also da wird tabellarisch "nur" die Standardeinstellung dokumentiert und man kann sich das in der ETS entsprechend umstellen.Aus der oben stehenden Tabelle können die voreingestellten Standardeinstellungen entnommen
werden. Die Priorität der einzelnen Kommunikationsobjekte, sowie die Flags können nach Bedarf
vom Benutzer angepasst werden. Die Flags weisen den Kommunikationsobjekten ihre jeweilige
Aufgabe in der Programmierung zu, dabei steht K für Kommunikation, L für Lesen, S für Schreiben, Ü
für Übertragen und A für Aktualisieren.
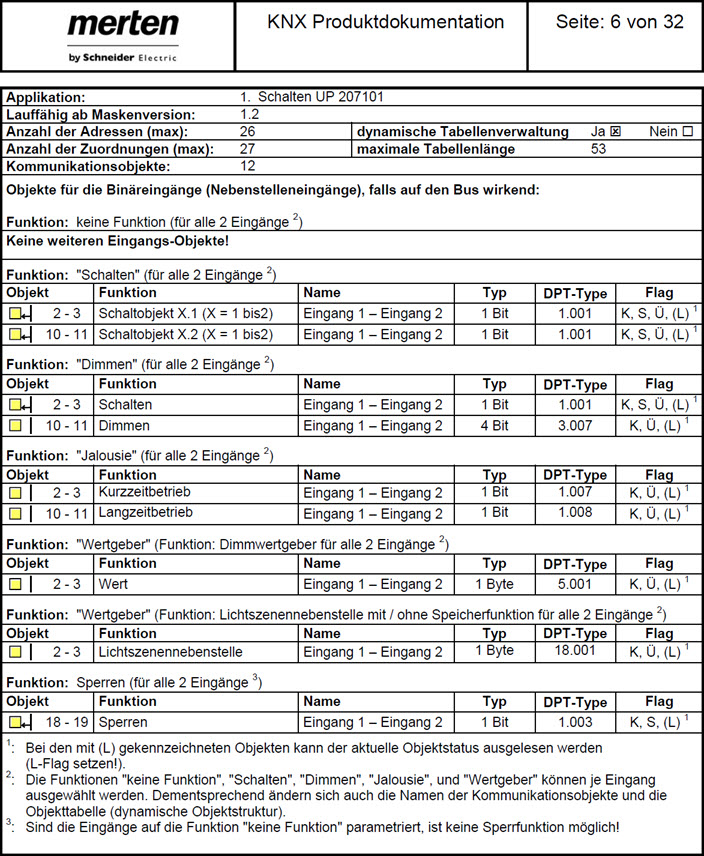
In einer Dokumentation von Merten wird das schon konkreter:
Hier ist auch der Default dokumentiert und das "(L)" jeweils in Klammern als optional setzbar erwähnt. An einigen Objekten fehlen nun einige Flags in der Doku, sind in der ETS aber setzbar. Was muss das Device da nun können? Das was der Hersteller dokumentiert hat, oder mehr?
Bei den nächsten Herstellern gibt es "nur" eine Tabelle aus der nicht hervorgeht, ob es sich um die gesetzten Defaults, oder die vom Gerät am jeweiligen KO grundsätzlich unterstützten Flags handelt....
Ihr seht mit ein wenig "Lost in Space"
Beste Grüße
Jens