Erste Versuche mit LE - PID-Regler
Verfasst: Do Mai 23, 2019 9:11 am
Moin,
ich versuche mich gerade testweise am experimentellen LE und habe mir dazu den PID-Regler vorgenommen. Drei Dinge sind mir aufgefallen (eventuell noch Hinweise auf Bugs oder Verbesserungsmöglichkeiten?):
1.
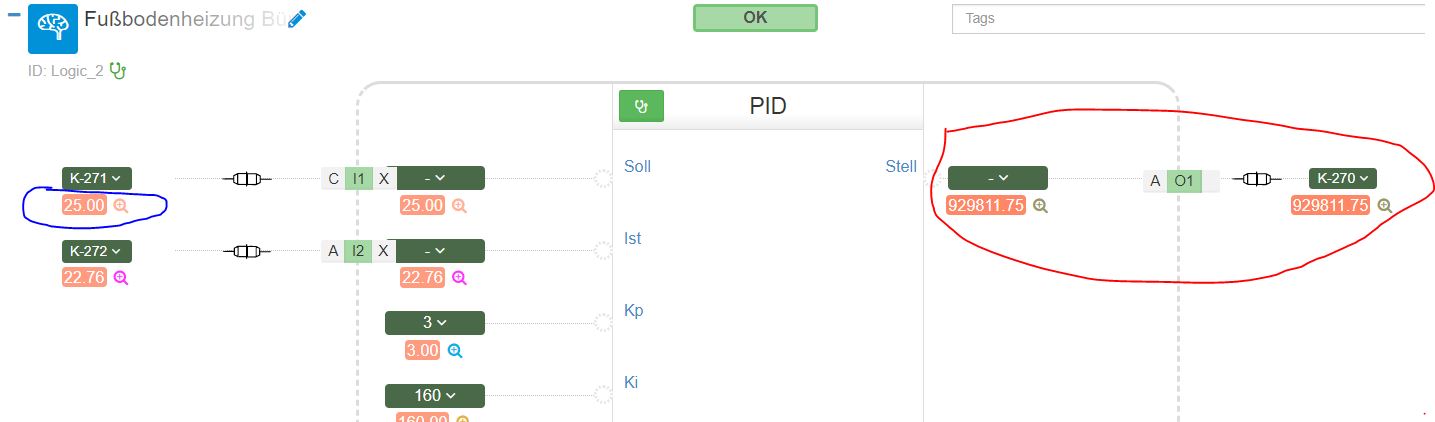
Mein als Ausgang gewähltes Objekt K-270 ist in der ETS und durch den Import folglich auch im TWS mit DPT 5.001 (0...100%) hinterlegt, das habe ich mehrfach überprüft. Der LE zeigt die Werte im Diagnosemodus (Doktormodus) aber dennoch scheinbar in absoluten Zahlen an. Ich hätte erwartet, dass da dann Prozentwerte angezeigt werden. Siehe Screenshot roter Kreis. Ist das noch ein Bug oder mache ich einen Gedankenfehler?
Auch Grafana zeigt mir hier nur absolute Werte an, wenn ich den Grafanabutton im LE Diagnosemodus klicke.
Der KNX Busmonitor liefert jedoch Prozentwerte -> in dem aktuellen Fall erwartete 100%, weil die 25°C Solltemperatur ja deutlich über der aktuellen Raumtemperatur liegen.
2.
Die mit blau eingekreiste Zahl irritiert mich dazu. Die Regel habe ich heute gegen grob 8:00 Uhr erstellt. Seit dem ist von keiner PA ein Wert auf den Bus geschrieben worden. Ich habe im Doktormodus mal manuell 25°C eingegeben um zu sehen, was denn so passiert. Das hat soweit funktioniert. Anschließend habe ich ausversehen das Taskfenster geschlossen. Ich bin mir recht sicher, dass ich die Logik vorher nicht gespeichert habe.
Als ich dann in einem neuen Taskfenster wieder in den LE gegangen bin, standen die 25°C noch immer in der Logik. Das heißt mein zu Testzwecken manuell eingegebene Wert bleibt auch dauerhaft anliegen obwohl er nicht auf den Bus geschrieben wird? Das verhalten war für mich erst überraschend, ist aber für mich jetzt nachvollziehbar.
Woran erkenne ich denn nun aber, dass die Logik grundsätzlich wieder auf Bussignale reagiert und der manuell eingegebene Wert nicht die Logik einfriert. Ich nehme an, dass erzeuge ich grundsätzlich per Klick auf das orange hinterlegt X, in dem Popoup, zur Eingabe manueller Werte. Aber es gibt kein optisches Feedback, dass jetzt wieder der nächste vom Bus gesendete Werte übernommen wird. In meinem Fall wird der Sollwert leider nicht zyklisch gesendet, weil die Zeitschaltuhr im Inzennio Z41 diese Möglichkeit m.E. nicht bietet.
3.
Deaktiviert man den Doktor-/Diagnosemodus, so bleibt die Logik dennoch vollständig aufgeklappt mit allen letzten Werten und der kleinen Grafik unterhalb der Logik sichtbar. Lediglich das grüne Stetoskopzeichen neben der Logic-ID verschwindet und der Diagnosebutton wechselt von grün auf grau. Die Werte sind nicht mehr anklickbar. Ich hätte erwartet, dass aber auch alle Anzeigewerte wieder verschwinden, so dass ein optischer Zustand hergestellt wird, wie wenn man eine Logik nach dem öffnen des LE oder nach dem Anlegen sieht. Das wäre dann aus meiner Sicht konsequenter und aufgeräumter.
VG,
Sven
ich versuche mich gerade testweise am experimentellen LE und habe mir dazu den PID-Regler vorgenommen. Drei Dinge sind mir aufgefallen (eventuell noch Hinweise auf Bugs oder Verbesserungsmöglichkeiten?):
1.
Mein als Ausgang gewähltes Objekt K-270 ist in der ETS und durch den Import folglich auch im TWS mit DPT 5.001 (0...100%) hinterlegt, das habe ich mehrfach überprüft. Der LE zeigt die Werte im Diagnosemodus (Doktormodus) aber dennoch scheinbar in absoluten Zahlen an. Ich hätte erwartet, dass da dann Prozentwerte angezeigt werden. Siehe Screenshot roter Kreis. Ist das noch ein Bug oder mache ich einen Gedankenfehler?
Auch Grafana zeigt mir hier nur absolute Werte an, wenn ich den Grafanabutton im LE Diagnosemodus klicke.
Der KNX Busmonitor liefert jedoch Prozentwerte -> in dem aktuellen Fall erwartete 100%, weil die 25°C Solltemperatur ja deutlich über der aktuellen Raumtemperatur liegen.
2.
Die mit blau eingekreiste Zahl irritiert mich dazu. Die Regel habe ich heute gegen grob 8:00 Uhr erstellt. Seit dem ist von keiner PA ein Wert auf den Bus geschrieben worden. Ich habe im Doktormodus mal manuell 25°C eingegeben um zu sehen, was denn so passiert. Das hat soweit funktioniert. Anschließend habe ich ausversehen das Taskfenster geschlossen. Ich bin mir recht sicher, dass ich die Logik vorher nicht gespeichert habe.
Als ich dann in einem neuen Taskfenster wieder in den LE gegangen bin, standen die 25°C noch immer in der Logik. Das heißt mein zu Testzwecken manuell eingegebene Wert bleibt auch dauerhaft anliegen obwohl er nicht auf den Bus geschrieben wird? Das verhalten war für mich erst überraschend, ist aber für mich jetzt nachvollziehbar.
Woran erkenne ich denn nun aber, dass die Logik grundsätzlich wieder auf Bussignale reagiert und der manuell eingegebene Wert nicht die Logik einfriert. Ich nehme an, dass erzeuge ich grundsätzlich per Klick auf das orange hinterlegt X, in dem Popoup, zur Eingabe manueller Werte. Aber es gibt kein optisches Feedback, dass jetzt wieder der nächste vom Bus gesendete Werte übernommen wird. In meinem Fall wird der Sollwert leider nicht zyklisch gesendet, weil die Zeitschaltuhr im Inzennio Z41 diese Möglichkeit m.E. nicht bietet.
3.
Deaktiviert man den Doktor-/Diagnosemodus, so bleibt die Logik dennoch vollständig aufgeklappt mit allen letzten Werten und der kleinen Grafik unterhalb der Logik sichtbar. Lediglich das grüne Stetoskopzeichen neben der Logic-ID verschwindet und der Diagnosebutton wechselt von grün auf grau. Die Werte sind nicht mehr anklickbar. Ich hätte erwartet, dass aber auch alle Anzeigewerte wieder verschwinden, so dass ein optischer Zustand hergestellt wird, wie wenn man eine Logik nach dem öffnen des LE oder nach dem Anlegen sieht. Das wäre dann aus meiner Sicht konsequenter und aufgeräumter.
VG,
Sven
 / Abgekoppelt:
/ Abgekoppelt:  (Zum Wechseln der Zustände auf das Symbol klicken)
(Zum Wechseln der Zustände auf das Symbol klicken)